▲画像:研究チーム提供
マサチューセッツ工科大学(MIT)とトヨタ自動車の研究チームは、自動運転車が視界の悪い交差点に進入するときに安全かどうかを判断する新しいモデルを設計したと発表した。
無人自動車でも人間のドライバーによる運転でも、交差点の通過を支援してくれる自動システムには、回避すべき物体が直接目視できることが必要なのだという。つまり、視界が付近の建物や障害物によって遮られていたら、システムがうまく働かないことがあるということだ。
▲画像:研究チーム提供
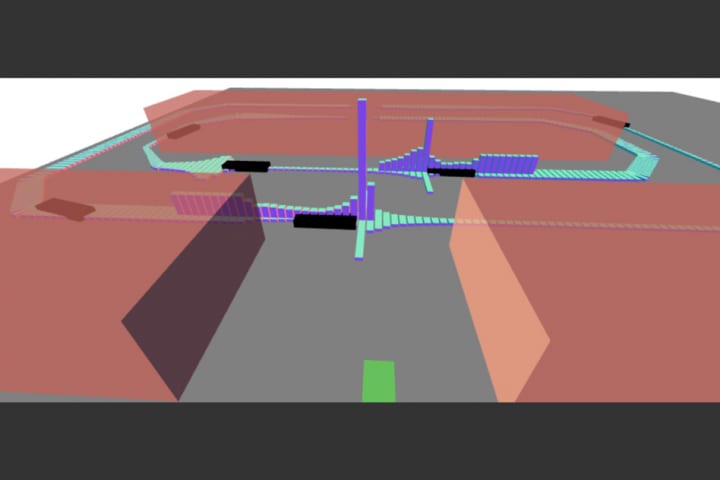
そこで研究チームが考案したのは、不確実性を推定する独自のモデルで、交差点で発生しうる潜在的な衝突や、その他の交通の混乱のリスクを判断する。
具体的には、付近にある目に見える障害物、センサーのノイズやエラー、走行する他の車の速度、さらには他のドライバーの注意力など、さまざまな要因から測定されたリスクにもとづいて、車が停止や進入をしたり、さらには少しだけ前進してデータを収集するなどのアドバイスをしてくれるのである。
同チームは、模型で都市の混雑した障害物のある交差点を再現。他の車が前方の道路をつねに走行している状況で、車が脇道から出てうまく左折できるかどうか、100回以上の実証実験を実施。実験では完全自動運転車とシステムの支援を受けた人間が運転する自動車を想定し、いずれの事例でも70~100%の割合で衝突を回避することに成功したそうだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。