▲Credit: Wyss Institute at Harvard University
表面を垂直に登ったり、逆さまでも表面にくっついたりできる、そんなマイクロロボットが開発中だ。
開発しているのは、ハーバード大学のヴィース研究所(Wyss Institute for Biologically Inspired Engineering)と同大学工学・応用科学スクール(John A. Paulson School of Engineering and Applied Sciences)の研究者チーム。
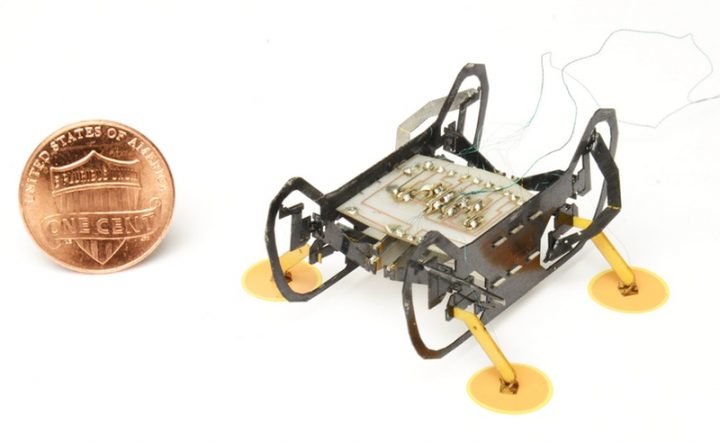
「HAMR-E」というこのマイクロロボットは、電子吸着フットパッド、折り紙のような足関節ジョイント、特別設計の歩行で、導電性のある表面を垂直や裏返しで登ることができるという。
たとえば、人間の作業員が入れないような、ジェットエンジンの内部の壁を登ることができる。既存のクライミングロボットでは垂直の表面は登れたが、裏向けで登るには転倒しないように大きな粘着力が必要だった。

▲Credit: Wyss Institute at Harvard University
パッドはポリイミド絶縁銅電極でできており、パッドと下にある導電性表面との間に静電力を発生させることができる。足関節ジョイントは、歩行時に足の回転を補うために3次元で回転するので、壁面での姿勢維持が可能。
また、転んだり滑り落ちないためには、3つの足パッドがつねに垂直または反転した表面に接触している必要がある。そこでHAMR-E用に特別な歩行パターンを考案。残りの3つが表面についたままで、足が1つだけ表面から離れて前方に踏み出し、また着地するようにした。
今後はビルや配管、エンジン、発電機などのインフラでも活用できるように、さらなる開発が続けられるそうだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。