▲研究チーム提供
マサチューセッツ工科大学の研究チームが開発した新しい学習システムは、目標形状へと材料を成形したり、固体や液体との相互作用を予測したりするロボットの能力を向上させるものである。
この「粒子シミュレータ」という学習システムを使えば、産業用ロボットにいっそう繊細な手の感覚を身に付けさせることができる。
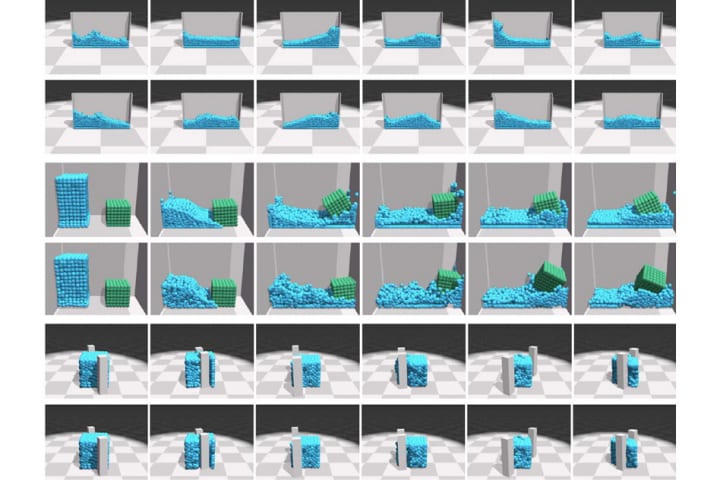
ロボット設計では、さまざまな材料が力を加えるとどうなるのかを把握させるモデル「物理シミュレータ」を使って「訓練」し、硬い箱を押したり、変形しやすい粘土をつついたりするなど、オブジェクトとの相互作用の結果を予測。しかし、従来のシミュレータは主に硬いオブジェクトを想定しており、流体や柔らかいものを扱うことはできないのだ。
実験では、「RiceGrip」と呼ばれる2本の指を持つロボットハンドが、形が変わりやすい粒状の物体を寿司の「シャリ」に見立てて、「T字型」などの希望の形状に成形。
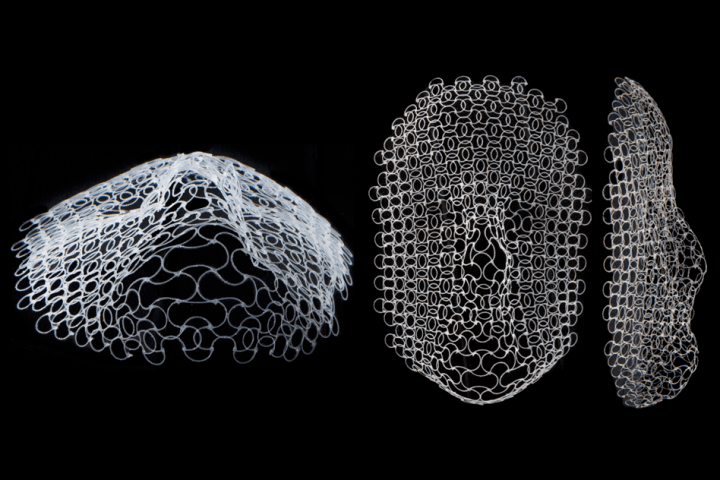
この場合、重要なのは、粒子の複雑な動きを捉えることができる何千ものノードとエッジからなる力学的な相互作用グラフを作成すること。グラフでは、ノードは粒子を表し、ある粒子から他の粒子への相互作用を表す方向がついたエッジが、隣接するノードとのつながりを示している。
トレーニングでは、時間の経過とともに、モデルがさまざまな粒子はどのように反応して形を変えるかを学習。それぞれの粒子の多様な属性を暗黙のうちに計算して、かきまぜたときに粒子がグラフ内でどのように移動するかを予測するのだそうだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。