▲北海道紋別港フィールド全景
東京大学 生産技術研究所 附属海中観測実装工学研究センターの巻俊宏准教授らの研究チームは、南極の海氷や棚氷域を探査する新しいAUV(自律型海中ロボット)「MONACA」を開発した。

▲AUV MONACA
南極は地球における熱、水、物質の巨大リザーバであり、地球全体の環境変動の大要因と考えられているという。そのメカニズムの解明に向けて、船舶や航空機、人工衛星などで南極の氷や地形、海水、気象などの観測が行われてきたが、南極大陸をとりまく棚氷や海氷の下部については船舶が入れず、ほとんど観測できていないそうだ。
そこで同研究チームは、海氷や棚氷の下に入り込み、全自動で航行しながら氷の裏面の形状を高精度に計測する「MONACA」を開発。全長2.1m、空中重量235 kg、最大潜航深度1,500 mで、動作時間は8時間、氷の裏側へは最大10 km潜入できるように設計されている。
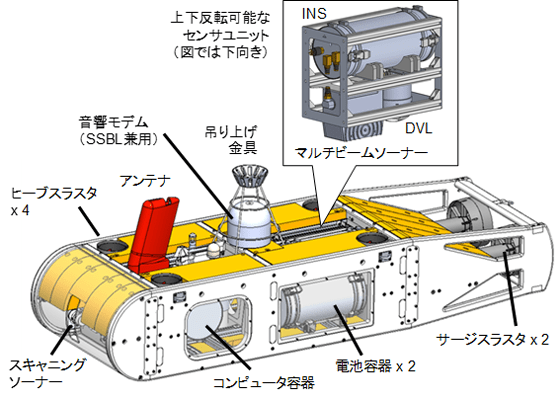
▲AUV MONACAの機器配置
▲AUV MONACAのイメージイラスト
「MONACA」はこれまで、北海道紋別港で全27回、のべ8時間17分、8.9 kmにわたって海氷下の全自動潜航を行い、のべ47,143㎡(東京ドームとほぼ同じ面積)の海氷裏面および5,875㎡の海底面の形状データを取得。そのうち1回(10分間、走行距離80 m)は、安全索をつけない完全無索での潜航だった。

▲AUV MONACAのセンサユニット

▲実験の様子(潜航開始直後の様子)

▲実験の様子(完全無索での潜航を終え、投入地点に戻ってきたMONACA)
AUVの展開・回収はともに狭い開口部から行い、またAUV自身が氷に対して相対的に測位しながら芝刈り機のように繰り返し往復できるので、面的に広い範囲を計測することが可能。
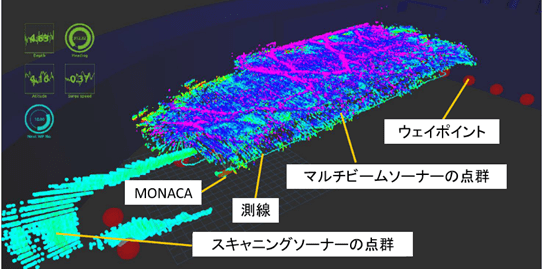
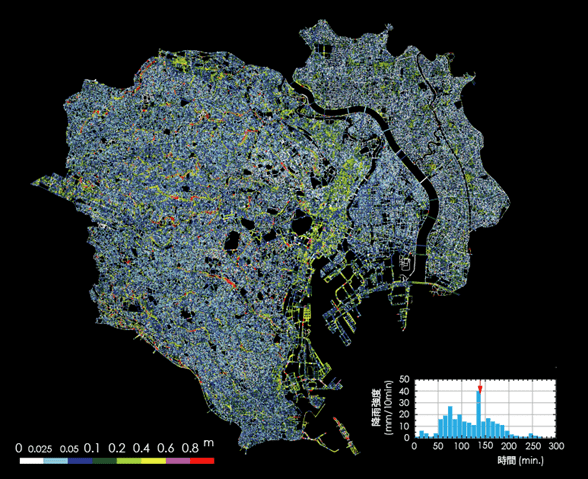
▲観測中の様子(センサデータを可視化したもの)
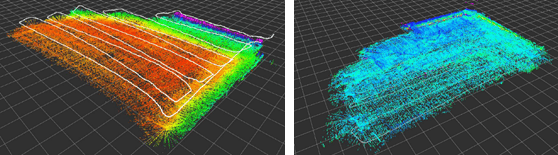
▲取得した形状データの例(左:海底面/右:氷裏面、いずれもグリッド幅は5mで、MONACAの航跡を白線で示す)
海中での無線通信は困難だが、外部支援に一切頼らずに開口部へ戻ってこられる高い自律性と安定性、高精度なナビゲーション能力を備えており、2022年度以降に予定されている南極での計測を通して、地球システムにおける南極の役割の解明を目指すとしている。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。