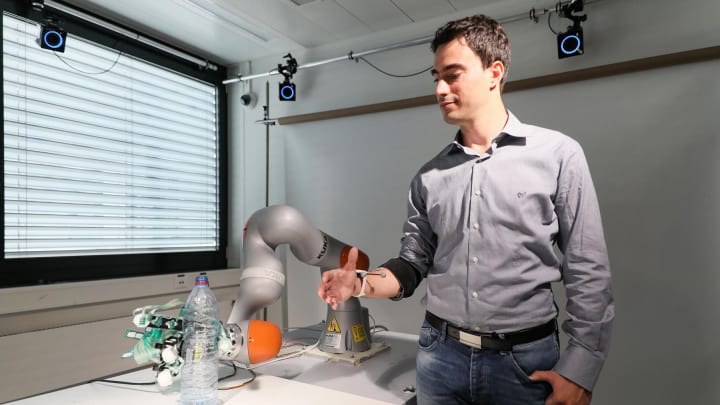
▲© 2019 EPFL / Alain Herzog.
ロボットハンドの開発が世界中でさかんに展開されているなか、スイス連邦工科大学ローザンヌ校が新たなロボットハンドを公開した。
今回発表されたのは、ロボット制御とユーザーの意思による制御を組み合わせた、新しい神経機能代替技術(neuroprosthetic technology)。とくに手を失った人向けのロボットハンドで、個々の指の制御と自動操作を組み合わせることで、よりうまく物体を掴んだり動かしたりできるようになるという。
その特長は、異なる2つの分野の概念を結びつけたことだそうで、ロボットハンド制御ではこれまで一緒に実装させたことはなかったそうだ。
そのうちのひとつが「神経工学」。切断した腕の先端にある筋肉の動きから実施したい指の動きを解読するそうで、これまでできなかった義手の個々の指の制御が可能になる。もうひとつの分野は「ロボット工学」で、ロボットハンドが物体を掴み、滑り落ちないように物体との接触をすばやく維持することで、しっかりとした把握ができるようになる。
指の制御については、アルゴリズムを用いることで、はじめにユーザーの意図を解読する方法を学習させ、これを義手の指の動きに変換。そして、ユーザーが物体を掴もうとしたときに自動で動くようにするアルゴリズムを開発。これにより、物体が義手の表面のセンサーと接触したときに、義手に指を閉じるように伝えてくれるのだ。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。