ロボットアームで形状が一定でないものを掴むことはいまだに難題だ。しかしここ数年で、ロボティクスは、やわらかで、柔軟性のある指を持ち、ゴムのような材料を使うことで、問題解決の糸口にたどり着いた。
このしなやかさにより、ブドウや箱、空のボトルなどまでも持ち上げることが可能になった。しかし、これらのアームでは、大きいものや重たいものを扱うことはまだできない。
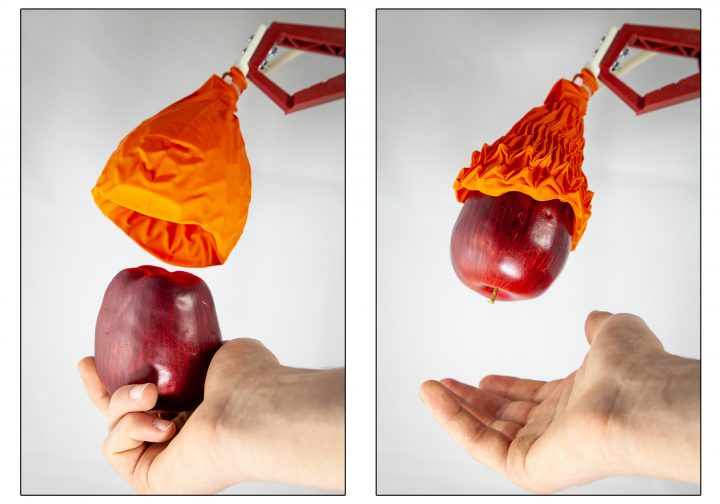
そこで、MITとハーバード大学の研究者らは、柔らかさと強さの両方を併せ持つ新しいグリップ方法を開発した。コーン型で対象物の形状に合わせて折り曲がる折り紙の構造を持ち、まるでハエトリグサのように、グリップの100倍ほどの重さのものを持ち上げることができる。
今回開発された折り紙「マジックボール」の構造は、これまでにないまったく新しいものだという。3つのパートにわかれ、折り紙を基にした骨格、対象を包む気密性のある表面、そして接続部だ。このグリップは機械で作ったゴム型と、高温で縮む特殊な熱収縮プラスチックを使って作ったそうだ。
将来、バラの花を摘んだり、病院で患者を優しく持ち上げたりができるようになることを期待している、と研究チームの1人は語っている。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。