



大林組と慶應義塾大学 グローバルリサーチインスティテュートハプティクス研究センターは共同で、力触覚を再現する技術「リアルハプティクス」を適用し、左官作業における手の動きや力、力触覚を再現できる建設技能作業再現システムを開発したことを発表した。
建設現場では近年、建設機械の遠隔作業や自動化・自律化が積極的に進められており、とくにAIによる画像認識などは人の視覚に代わる機能として活用されているという。
その一方で、建設作業には、モルタルの硬さや重さをコテで感じながら建築物に塗る左官作業など、視覚だけでなく力触覚が必要な作業も多く、遠隔作業や自動化・自律化を進めるうえで力触覚を再現することが重要な要素のひとつになっているそうだ。
同研究グループは、これまでにも「リアルハプティクス」を油圧駆動の建設重機に適用するなど、建設現場における力触覚の活用に向けた実証を行っており、今回新たに遠隔で左官作業ができるこのシステムを開発。
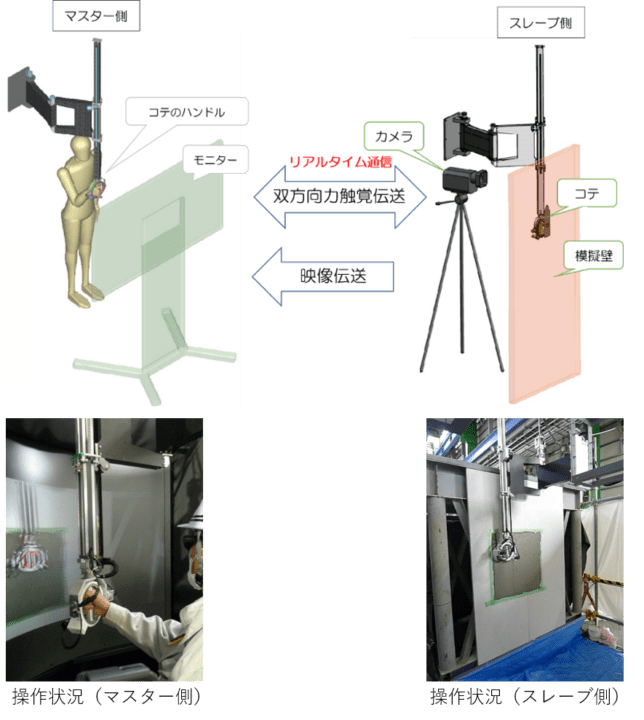
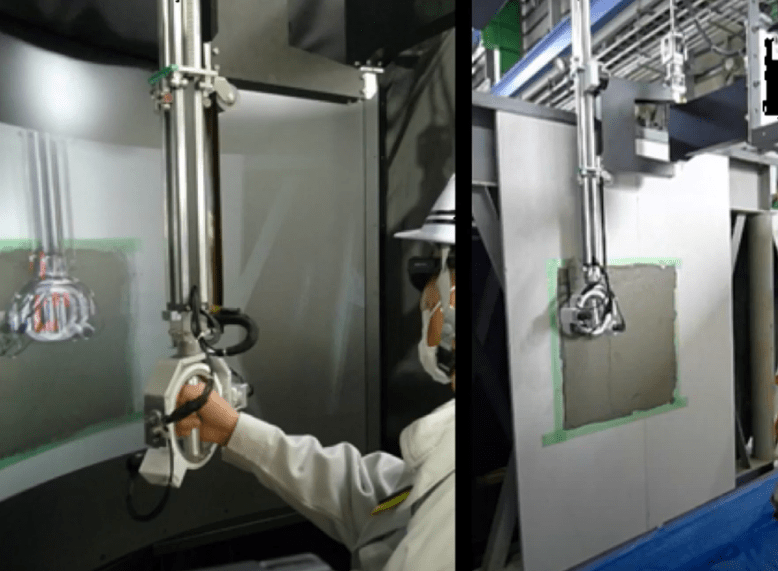
このシステムには、人が操作するコテを模したハンドル装置(マスター)と、現地で動作するコテを設置したAvatarロボット(スレーブ)があり、マスター側ではスレーブから送信された映像を視覚で確認しつつ、ハンドル部分にはコテの力触覚が再現されて、実際に壁にコテを当てたかのような感触を感じながら作業することができる。
実証実験では、細かい表面の仕上がり状況など職人が必要とする視覚情報を取得するとともに、力触覚の伝達として厚さ1mm以下の精度でコテの動きを再現し、通常の左官作業と同等の仕上げを実現。今後は数百km離れた遠隔地での再現作業を予定している。![]()

「AXIS」編集部
Webマガジン「AXIS」の編集チーム。デザイン専門メディアらしい情報から、日々の業務で溢れ出しそうなことまで、メンバーの有り余るエネルギーをもってお伝えします。





